
About Me
I am Junfei Yi (易俊飞), a Postdoctoral Researcher in Control Science and Engineering (控制科学与工程, a national key discipline) at Hunan University. I am affiliated with the School of Artificial Intelligence and Robotics and the National Engineering Research Center of Robot Visual Perception and Control Technology.
My postdoctoral work is jointly supervised by Prof. Yaonan Wang (王耀南,中国工程院院士) and Prof. Hui Zhang (张辉,长江学者特聘教授). I completed my Ph.D. at Hunan University under the supervision of Prof. Wang, Prof. Jianxu Mao (毛建旭), and Prof. Zhang. From February 2024 to February 2025, I was a visiting student at the University of Technology Sydney, working with Prof. Xiaojun Chang (常晓军,长江讲席特聘教授).
My research is driven by major engineering needs in robotics and intelligent inspection. I work on robust robotic perception, precise localization, efficient recognition, object detection, visual inspection, and knowledge distillation for complex, resource-constrained, and cross-scale industrial environments.
Research Profile
During my doctoral research, I focused on the deep integration of theoretical modeling and engineering validation for robot perception under complex changing environments, cross-scale multi-shape targets, and limited computing resources. I have developed a methodological framework for robust perception, precise localization, and efficient recognition (鲁棒感知-精准定位-高效识别), enabling high-accuracy and efficient robotic detection and recognition in complex constrained scenes.
I have published 40+ papers in high-impact journals and conferences, including IEEE TPAMI, IEEE TCSVT, IEEE TNNLS, IEEE TII, IEEE/ASME Transactions on Mechatronics, ICCV, and Scientia Sinica Informationis (中国科学: 信息科学).
News
- 2026.05: MeSIF-Net: Multi-level Cross-scale Information Fusion via Knowledge Distillation for Low-resolution Industrial Surface Defect Detection is accepted by Information Fusion (IF=15.5). Congratulations to Zhiqiang!
- 2026.03: Distilling Object Detectors via Monte Carlo Dropout appears in IEEE Transactions on Pattern Analysis and Machine Intelligence.
- 2026.03: CoreKD appears in IEEE Transactions on Neural Networks and Learning Systems.
- 2026.01: Received the 2025 IEEE TIM Outstanding Reviewer award.
- 2025.10: Invited as a keynote speaker at the 8th CSIG National Conference on Visual Inspection Technologies.
- 2025.09: Our patent was officially granted by the United States Patent and Trademark Office.
- 2025.08: One paper is accepted to ACM Transactions on Intelligent Systems and Technology.
- 2025.07: One paper is accepted to IEEE Transactions on Industrial Informatics.
- 2025.06: CVPT: Cross Visual Prompt Tuning is accepted by ICCV 2025.
Publications
Representative First-author Papers

Distilling Object Detectors via Monte Carlo Dropout
- Uncertainty-driven knowledge extraction and transfer for object detection distillation.
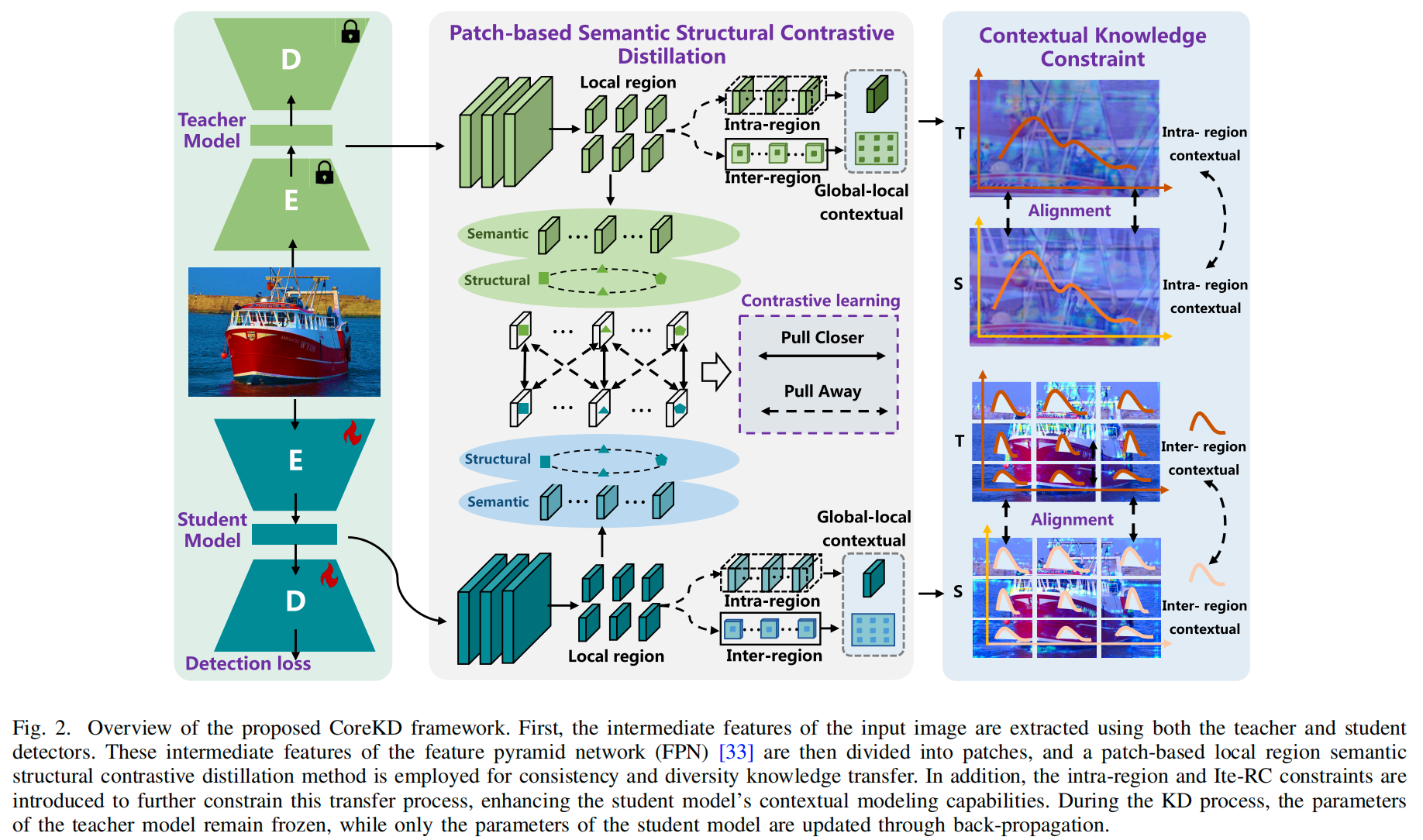
CoreKD: A Context-Aware Local Region Structural Contrastive Knowledge Distillation Framework for Object Detection
- Context-aware local region structural contrastive distillation for object detection.
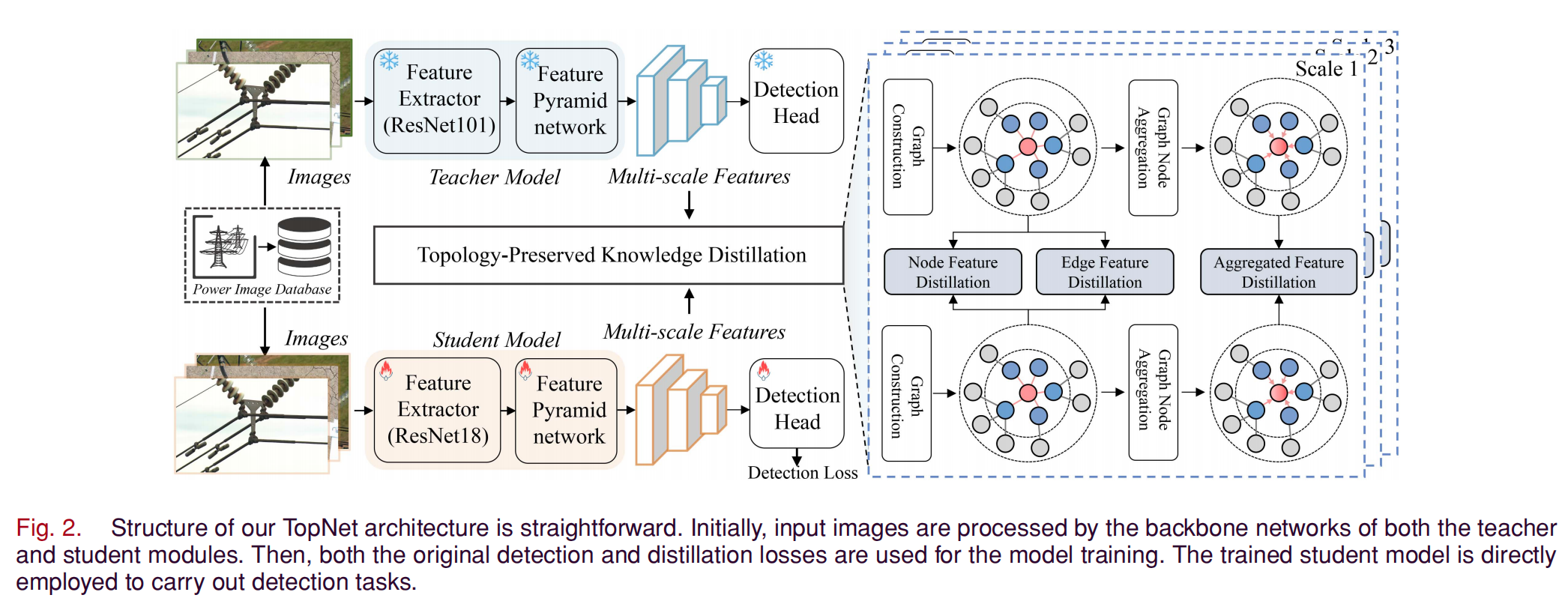
Toward Efficient Power Scene Detection via Topology-Preserved Knowledge Distillation
- Topology-preserved knowledge distillation for efficient power scene detection.
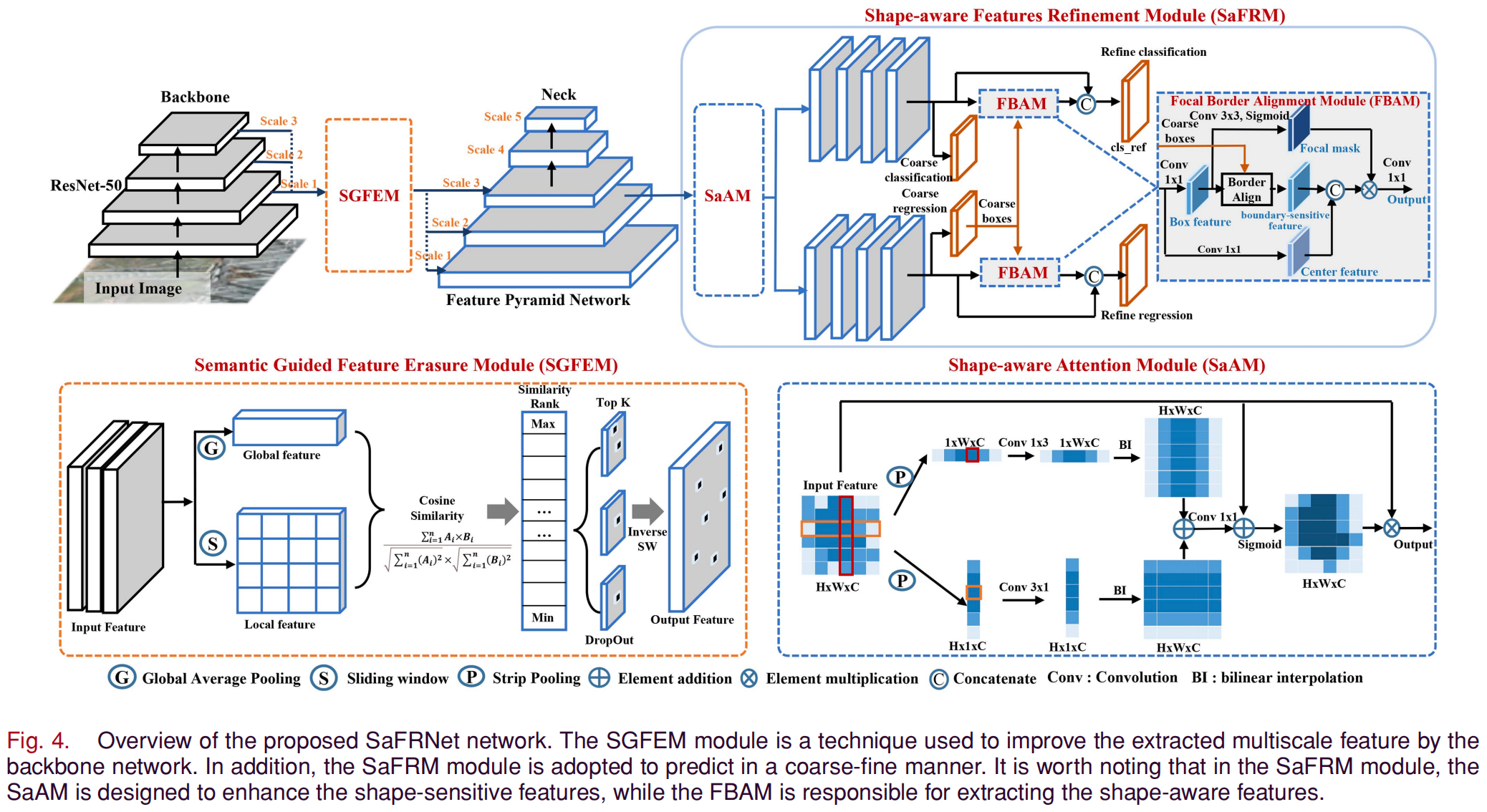
A Novel Transmission Line Inspection Method Based on the Shape-Aware Features Refinement Network
- Shape-aware feature refinement for UAV-based transmission line inspection.
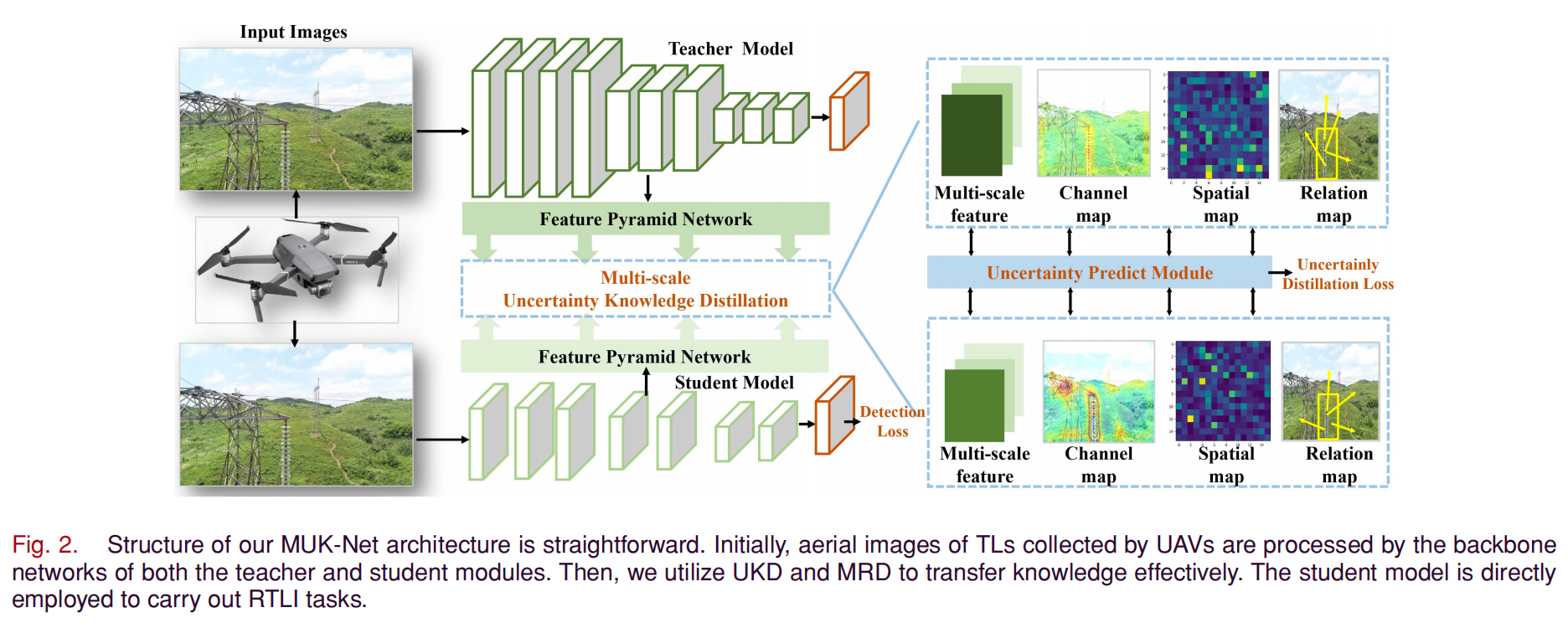
Balancing Accuracy and Efficiency With a Multiscale Uncertainty-Aware Knowledge-Based Network for Transmission Line Inspection
- Multiscale uncertainty-aware knowledge transfer for efficient inspection models.
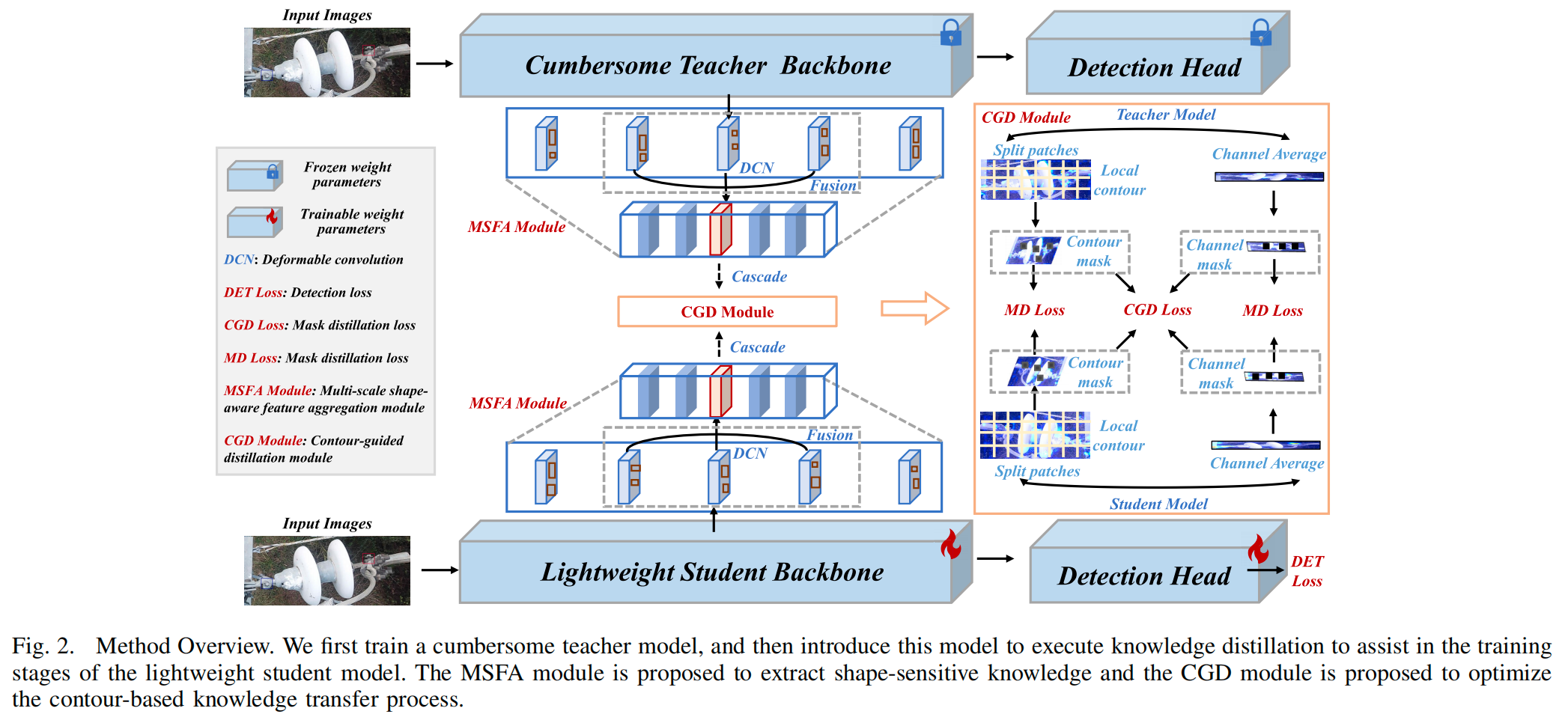
FMSD: Focal Multi-scale Shape-feature Distillation Network for Small Fasteners Detection in Electric Power Scene
- Shape-sensitive and contour-guided distillation for small fastener detection.

PSTL-Net: A Patchwise Self-Texture-Learning Network for Transmission Line Inspection
- Patchwise self-texture learning for robust transmission line inspection.
For the full and latest publication record, please visit my Google Scholar profile.
Honors and Awards
- 中国商业联合会科技创新奖一等奖.
- 中国发明协会发明创业奖创新奖二等奖.
- 中国商业联合会全国服务业科技创新奖一等奖.
- Selected by the China Association for Science and Technology (CAST) Excellent Scientific and Technological Paper Program (中国科协优秀科技论文遴选计划, 22 papers selected nationally in the field).
- Best Paper Award from Control and Decision (《控制与决策》最佳论文奖).
- National Scholarship from the Ministry of Education, Ph.D. stage (2024.10).
- National Scholarship from the Ministry of Education, M.S. stage (2020.10).
- 2025 IEEE TIM Outstanding Reviewer Award.
- 2024 IEEE TIM Outstanding Reviewer Award.
- Keynote speaker at the 8th CSIG National Conference on Visual Inspection Technologies.
- One United States invention patent and six Chinese invention patents granted.
- Hunan University Outstanding Graduate Student and Outstanding Graduate Award, 2025.
Projects
- 国家留学基金委博士联合培养项目:University of Technology Sydney, hosted by Prof. Xiaojun Chang(2024–2025),主持。
- 湖南省研究生科研创新项目:基于CNN和GCN多模型融合的药液异物检测方法研究(2022–2024,1万),主持。
- 湖南省研究生科研创新项目:复杂电力场景下的机器人三维视觉检测技术研究(2020–2021,1万),主持。
- 国家科技重大专项:高精度智能装调的具身感知模型与自主执行系统研发及验证(3318.94万),课题骨干。
- 国家自然科学基金重点项目:复杂受限环境下机器人多模态三维感知与自主灵巧作业研究(2021–2026,290万),核心成员。
- 国家自然科学基金重大项目课题二:大范围制造场景下集群机器人多模态精准感知(2023–2027,200万),核心成员。
- 国家电网公司总部科技项目:高性能声音敏感材料、器件与智能声源定位系统研究及应用(2024–2026,260万),核心成员。
Service and Talks
- Long-term reviewer for leading journals and conferences, including IEEE TNNLS, IEEE TII, IEEE TIM, and ICCV.
- Invited academic talks at the 2025 CSIG National Conference on Visual Inspection Technologies and national postdoctoral academic exchange events.
Educations
- 2025 - present: Postdoctoral Researcher, Control Science and Engineering, Hunan University, Changsha.
- Ph.D.: Hunan University, National Engineering Research Center of Robot Visual Perception and Control Technology.
- 2024.02 - 2025.02: Visiting student, University of Technology Sydney.